Засел тут на одной очень нужной мелочи, дабы отвлечь мозги решил с недавно купленным акселерометром поиграться.
Те кто видел недавно снятые видеоролики с борта самолёта, стопудово испытывали приступы тошноты из-за дикого расколбаса картинки. При наблюдении с земли трудно самолёт удержать ровно, особенно при сильном ветре. Так что нужно что-нибудь, автоматически удерживающее самолёт ровно. Вроде бы такая штука называется "автогоризонт", но у меня её нету. Но зато есть аксель и валяется лишняя Ардуина (которая Nano). Единственная из подаренного , чему ещё не нашлось применения. А, не, вру. Ещё экранчик есть, его я тож пока нигде не задействовал.
Arduino Nano хороша тем что она очень нано. В смысле, маленькая по габаритам. Так что на самолёте место для неё всегда найдётся.
Floater-Jet решил пока не трогать, а поэкспериментировать на подаренном Дядей Васей летающем крыле конструкции "Вжик". "Вжик" сейчас слегка в полуубитом состоянии, так что как раз для экспериментов сойдёт.
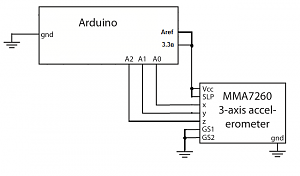
Принцип простой - подключить акселерометр к ардуине и заставить её постоянно считывать значения осей X и Y, ответственных за крен и тангаж. После считывания значений (в случае ухода из нормы) - выдавать на рулевые сервы компенсирующее значение. Чтоб крыло вернулось в плоскость горизонта.
Проблем со считыванием осей не было, но у акселя довольно сильная погрешность, значения скачут как блохи в неприлично большом диапазоне. Соответственно, рули колбасятся нипадецки. Тут на помощь пришёл . И в результате простейшей обработки простейшим вариантом этого фильтра стало всё отлично - показания акселя сглаживаются и рули ведут себя пристойно.
Скорость реакции рулей можно и пошустрей сделать, сейчас стоит задержка 50мс.
По задумке, данная фича (которая "автогоризонт") будет включаться с пульта управления. Т.е. взлетаешь в обычном режиме, поднимаешься на высоту. Когда надо лететь ровно и горизонтально - на пульте переключаешь тумблер (благо свободных каналов на моей турниге пока хватает) и бац - врубается автогоризонт. Самолёт летит ровно, снимает окрестности. Ветер пытается его колбасить - а самолёт сам сопротивляется и возвращается на горизонт. Правда, курс удерживать не будет - эт надо ещё гироскоп добавлять да магнитометр. Пока хватит и акселя.
Собссно, пока всё. Как будет лётная погодка - попробую испытать в действии. Только вот переставлю с крыла на более спокойнолетающий флоатер.
P.S. Кстати низкочастотный фильтр оказался мегаклёвой штукой. Для градусника он очень пригодится, показания сглаживать, ибо там тож скачет нехило.
UPD>
UPD> Ну и скетч, на всяк случай.
[code]
#include <Servo.h>
#define SERVA1_PIN 6 #define SERVA2_PIN 7
#define K 0.1
#define PIN_X 4 #define PIN_Y 5 #define PIN_Z 6
int x, y, z;
int dx=330; int dy=455; //калибровка датчика int dz=0;
2 Гость: Дим, ты б зарегался хоть шоп из-под гостя не писать :-) Намёк про уход понял, уже проверил. Действительно, при резком рывке аксель срабатывает. Но задумывалось для планирования с высоты, где есть только G. Так что надо практические испытания провести.
2 dimaris: Не, тема протухла. Эт мои первые опыты были с акселями. А потом я узнал про гироскопы, пиды и прочую хреномантию. Так что всё что тут описано - аццкий наивняк :-)




Dmitry Четверг, 3 Ноября, 2011 00:05 цитировать ссылка на коммент
Dmitry
Gol Четверг, 3 Ноября, 2011 00:25 цитировать ссылка на коммент
Gol Четверг, 3 Ноября, 2011 00:36 цитировать ссылка на коммент
Дим, ты б зарегался хоть шоп из-под гостя не писать :-) Намёк про уход понял, уже проверил. Действительно, при резком рывке аксель срабатывает. Но задумывалось для планирования с высоты, где есть только G. Так что надо практические испытания провести.
Gol Четверг, 3 Ноября, 2011 00:42 цитировать ссылка на коммент
Гость Среда, 4 Января, 2012 05:54 цитировать ссылка на коммент
Гость Воскресенье, 21 Октября, 2012 21:41 цитировать ссылка на коммент
Gol Воскресенье, 21 Октября, 2012 21:59 цитировать ссылка на коммент
Да ладно, я ж не сам это придумал, позаимствовал где-то. И это лишь жалкое подобие Калману. Но вроде работает, и то ладно.
Gol Вторник, 19 Февраля, 2013 21:35 цитировать ссылка на коммент
Гость Пятница, 7 Августа, 2015 13:42 цитировать ссылка на коммент
Гость Воскресенье, 9 Августа, 2015 16:17 цитировать ссылка на коммент
Поручик, молчать!
Гость Пятница, 8 Января, 2016 08:29 цитировать ссылка на коммент
Гость Пятница, 8 Января, 2016 08:33 цитировать ссылка на коммент
dimaris Среда, 7 Декабря, 2016 15:04 цитировать ссылка на коммент
Gol Понедельник, 12 Декабря, 2016 19:19 цитировать ссылка на коммент
Не, тема протухла. Эт мои первые опыты были с акселями. А потом я узнал про гироскопы, пиды и прочую хреномантию. Так что всё что тут описано - аццкий наивняк :-)