Задолбался в кровати валяться. Хотя ещё заметно колбасит, до конца толком ещё не выздоровел. Понадобилось собрать какую-нить ездящую хреновину, дабы сделать "стенд" для проверки управлялки роботами в Киберзоне. Управлялка универсальная, может рулить чем угодно (формат команд тока адаптировать надо ибо везде разные).
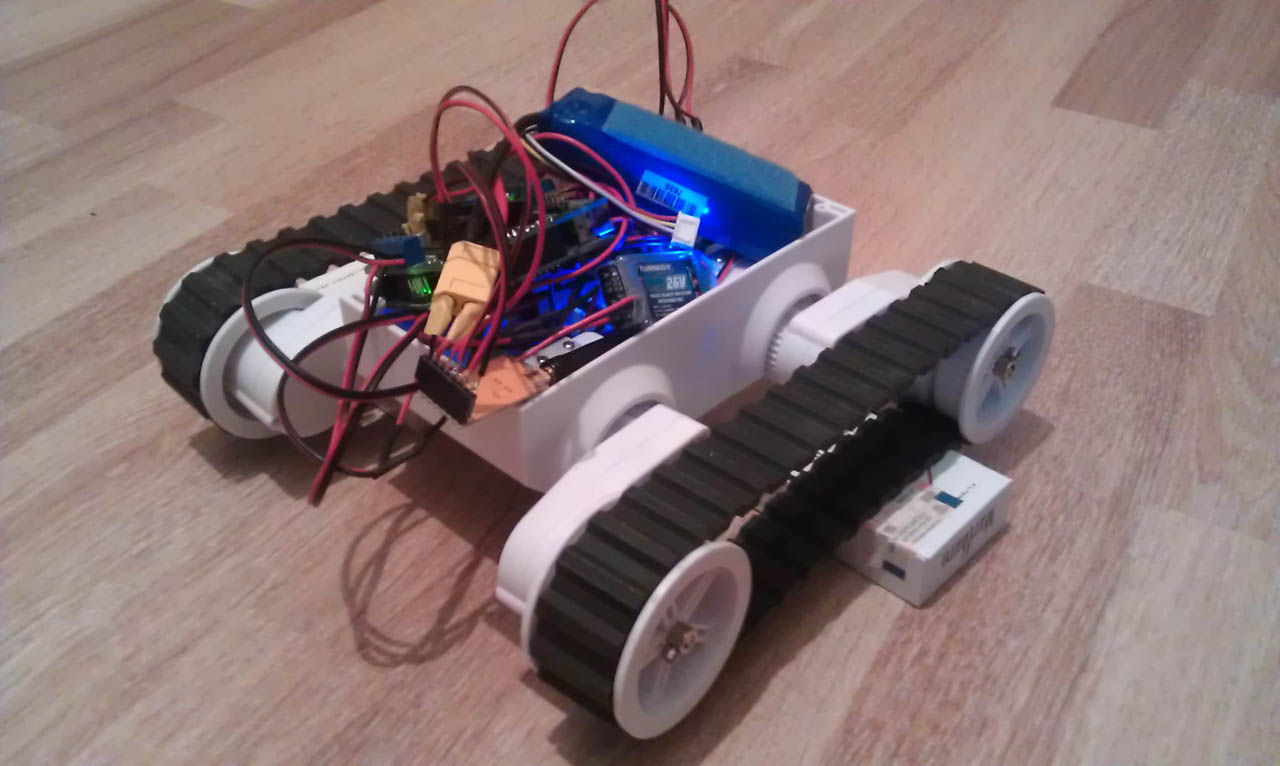
Вспомнил что у меня давно уже пылится шасси Dagu Rover5. Взял адруинку, приделал к ней моторшылд, добавил трансивер APC220. Запитал всё от самолётного аккума (3S 2200mAh). Правда, микрухи на моторшылде стали дико греться, так что понизил напряжение до 6В с помощью BEC адаптера от самолёта.
Схема получилась такая - нажатия кнопок в флешовой рулилке отправляются по сетке на вторую ардуинку, которая команду отправляет на APC220. С APC220 по воздуху на частоте 433Mhz команда уходит на APC220 на борту тележки. Далее обрабатываецо ардуинкой и выдаются сигналы на контролеры моторов. Всё просто.
Но щас засада с питанием - каждому мотору вынь да положь 2.5А в пике. А их аж четыре. Соответстенно, BEC (который могёт максимум 5А) загинается. Ну и скорость маловата, ибо моторы хотят 7.2В а моторшылд выдаёт 6В (ибо общее бортовое питание BEC, другого понижателя напряжения пока под рукой нету).
Итого на "сборку" ушло 4 часа с перекурами и чаепитиямию. С питанием чего-нить придумаю (другой шылд нуна), а пока пусть так ездит. Через инет управлять уже можно, но ещё команды не прописывал. Ну и видео с борта пока не получится ибо тупо не утащит камеру с дополнительным аккумом :-( Зато наконец-то появилось хоть что-то с возможностью пропорционального управления. Теперь мона джойстег будет проверить (онлайн-рулилка даж поддерживает управление с помощью джойстегов и даж с обратной связью).
Ролик снимал Катюхиным телефоном, сорри за смазанность.
Ну и вдогонку - Дядя Сем на 8-е марта Вике подарил прикольную игрушку. называецо. Управляются по ИК с телефона (в комплекте есть адаптер, втыкается в аудиовыход телефона). Скачиваешь софтину (есть под Андроид и под iOS) и рулишь. Софтина на редкость тупая - два дискретных ползунка вперёд назад и усё. Самый прикол - когда танкботик этот автономно гоняет. Имеет спереди ИК датчик, засекает препятствие и объезжает. Правда, датчик стоит довольно высоко, так что низкие препятствия не видит.
UPD> Моторшылды на разные токи нашёль вот тут - , надо бы затариться...
UPD> Подключил моторы по-парно последовательно. Греться всё сразу перестало. Ещё можно параллельно ключи подключить, но эт пока вроде особо не требуется. Пока ездить можно, уже гут. BEC уже без надобности. Теперь надо камеру какую-нить приделать, но сначала надо всё жёстко закрепить, а то ардуинка да батарея сваливаются.
Кстати, гусеницы ништяг. Даж на зеркало взбирается до вертикального положения.
UPD> Как-то между делом на платформочку добавил Wi-Fi ip-камеру. На видеосервер RTSP поток пока не заводил, тестю на VLC (а это лаги дикие ибо влц - тормоз). Камера запитана от отдельного аккума (LiPo 3S 2200mAh) через самолётный BEC на 5В. Кстати, у камеры нет вайфайной антенны. Как тогда (после эпичного полёта камеры из окна с высоты более 50 метров) отвалилась, так я её ещё не припаивал :-) Но вайфай всё равно работает.
Места на платформе очень не хватает, надо бы какой-нить корпусочег выстрогать чтоб к нему крепить. А то ща всё свалено в дикую кучу.
UPD> На платформочку, опять-таки, между делом :-) добавлен трёхосевой акселерометр MMA7260. Теперь опасные углы крена засекаются и тачанка дальше не едет. Ещё добавить MP3-шылд, записать на него какие-нить ругательства и будет лепота - наезжаешь на препятствие, а платформочка останавливается и начинает крыть матюгами.
UPD> Ультразвуковые сонары уже едут (для коптера заказывал, плюс парочку про запас), на эту же платформочку поставлю тады.
UPD> Эхх, вот сегодня прикуплю проводов и можно будет клешню доделать, а то что-то она зависла из-за недостатка материалов. Зато как-то неожиданно между делом такая клёвая гусеница вышла :-D Вот чем хороша Ардуинка - так это модульностью. Раньше обкатывал разные модули по-отдельности, а тут бац - и за несколько часов скомпоновал их в кучку. И всё даже работает.
UPD> На пробу повесил аналоговую камеру (правда, у меня только чёрно-белая, но зато очень светочувствительная) и FPV-комплект из радиопередатчика и приёмника (1.2Ghz). Помехи от радиоканала управления иногда проскакивают, но не мешают. Главное что на управлении помехи не сказываются. А вообще - клёво. Создаётся впечатление, как будто луноходом управляешь :-)
Аналоговое видео, конечно, хреново тем что эфирные помехи периодически проскакивают. Но ценное преимущество перед "цифровым" вайфайным - дальнобойность. У меня вот на кухне домашний вайфай уже нифига не ловится, а аналоговый FPV передатчик у меня пишут что на полтора-два километра бьёт при прямой видимости. Соответственно, сейчас уже гусеничную платформочку уже можно вынести на улицу во двор и поездить. Главное шоп рядом кто-нить из своих был, чтоб тележку не спёрли.
Небольшой видеоролик своего первого FPV снял. Правда, пока не на самолёте, но это всё равно - FPV. First Person View - вид от первого лица. Камера ну очень уж светочувствительная (SONY 1/3" SUPER HAD CCD, 0.05 Lux/F2.0, угол обзора 170 градусов, сигнал/шум более 48 Дб). Это в коридоре особенно заметно - там свет выключен, только с кухни немного света проникает, а там включена одна маленькая слабенькая люминисцентная лампочка. Но всё равно через камеру в коридоре видимость приличная. В конце видеоролика я с телефоном по коридору шёл - можно сравнить светочувствительность камеры на телефоне и камеры на тележке.
UPD> Завёл на видеосервер, теперь полноценное управление через инет. У меня дома два провайдера, тестирую в боевых условиях, подключаясь с одного на другой.
UPD> Попробовал снова приделать вайфайную ip-камеру - хреново пашет. Пинг до камеры скачет как заяц, чуть отъедет - вообще пропадает. Похоже, надо всё-таки припаять антенну :-(
UPD> Припаял антенну, ништяг стало.
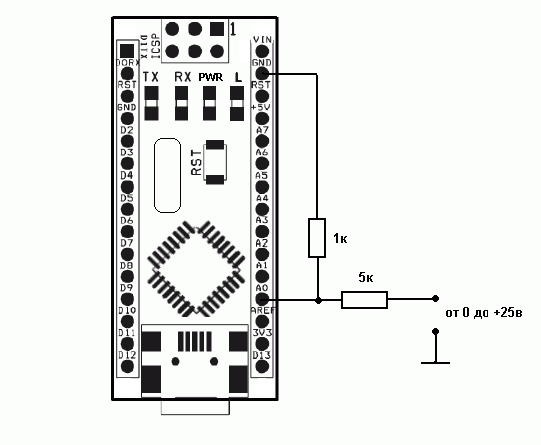
UPD> На борт добавлен контроль заряда аккумулятора. Рецепт найден . Схему делителя напряжения и подключения тырю оттуда же. Хотя тут прям проще некуда, но на всяк случай пусть будет картинка. Единственное замечание по схеме - земля на ардуине подходит, а вот на шылдах не везде. Так что лучше напрямую подключать к клемме аккумулятора. Номиналы сопротивлений для получения требуемого выходного напряжения можно рассчитать тут (если влом считать на бумажке) - .
Так как ардуине на аналоговом входе надо 5В давать, а аккумулятор 3S (11.7В) заряжается максимальным напряжением 12.5В, я взял максималку в 15В (про запас) и в итоге номиналы получились такие: 1KОм - R2 и 2КОм - R1.
UPD> Ребята из Кибер-зоны очень настаивали на том, что роботам надо пропорциональное управление. Чтоб можно было тихонько из-за угла развалин домика подкрасться да как засандалить пулькой межу фар противнику...
Собссно, как о пропорциональном управлении будет следующий абзац.
Но сначала видеоролик:
Управление ардуиной, тележками, сервами и прочей хренью с джойстиков/геймпадов не делал только ленивый. Вот и я сделал. Но с остальными ленивыми у меня одно маааленькое отличие - джойстиком управление через инет. Пропорционально (или дискретно, надо лишь кнопки добавить соответствующие) - рулится на ура. Правда, у моей тележки моторы на низкой скорости не тянут, пищать начинают. На днях придут мощный моторшылд и большие колёса на смену гусеницам, мож так получше будет.
Итак, флешка-рулилка получает инфу с джойстика, отправляет всё на сервер, а там уж команды уходят на платформу. Есть обратная связь - если с борта приходит определённая команда (например, при засекании препятствия, но у меня датчика такого пока нет) - на джойстик уходит сигнал о необходимости повибрировать. Даже Force Feedback можно добавить - это несколько функций дописать, но у меня нет девайсов с такой обратной связью, так что проверить пока не могу.
В общем, радуюсь - такую штуку давно собирался сделать. Точнее, сделать-то давно сделал, но проверить на деле негде было. Конечно, с аналогового джоя команд намного больше уходит, тут надо немного подоптимизировать будет. Ну и кнопки добавить на стрельбу, включение фар и т.д.
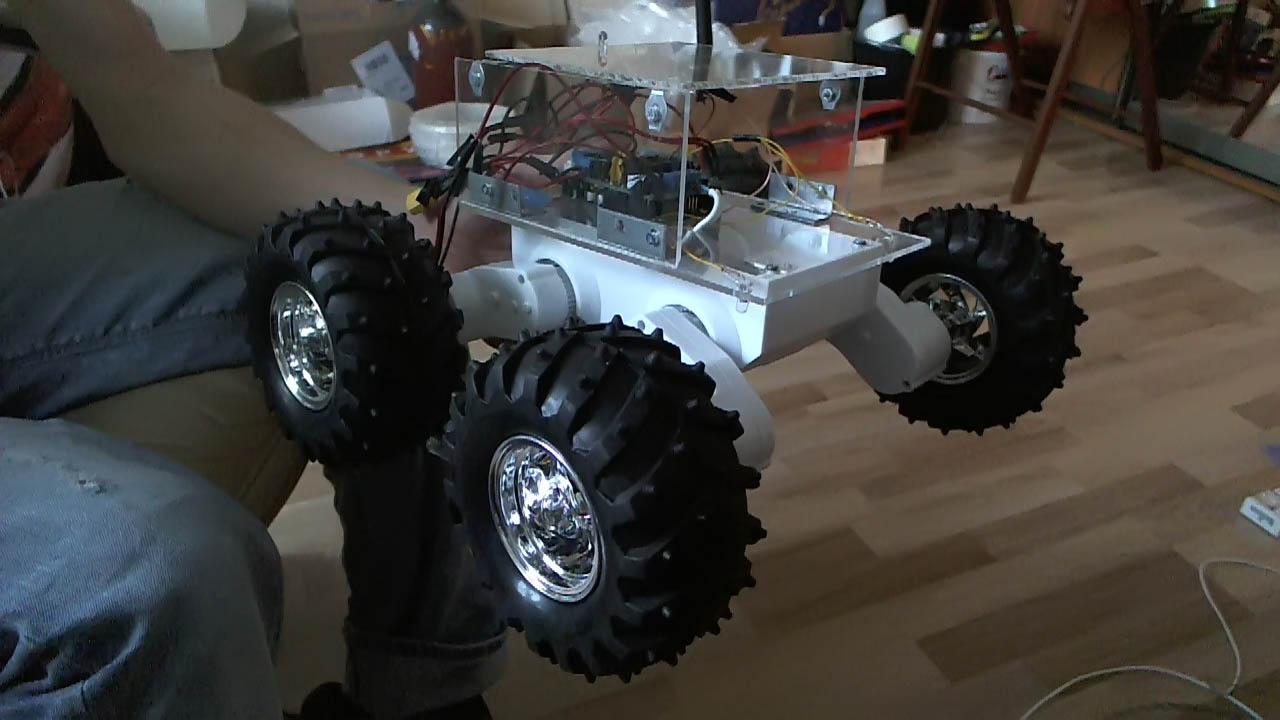
UPD> Купил оргстекло, попробовал сделать нечто вроде корпуса, чтоб было к чему платы крепить и чтоб всё не сваливалось. Пилил-строгал полтора часа, в итоге получился аквариум на колёсиках. Тупо прямоугольник из прозрачного оргстекла, смотрится паршивенько. Но свою задачу выполняет - к нему реально удобно всё крепить. Заодно приделал парочку светодиодиков, чтоб повеселее конструкция смотрелась. А вообще, конечно, надо нормальный корпус. Похоже, придётся попросить питерских коллег, чтоб нарезали из поликарбоната :-)
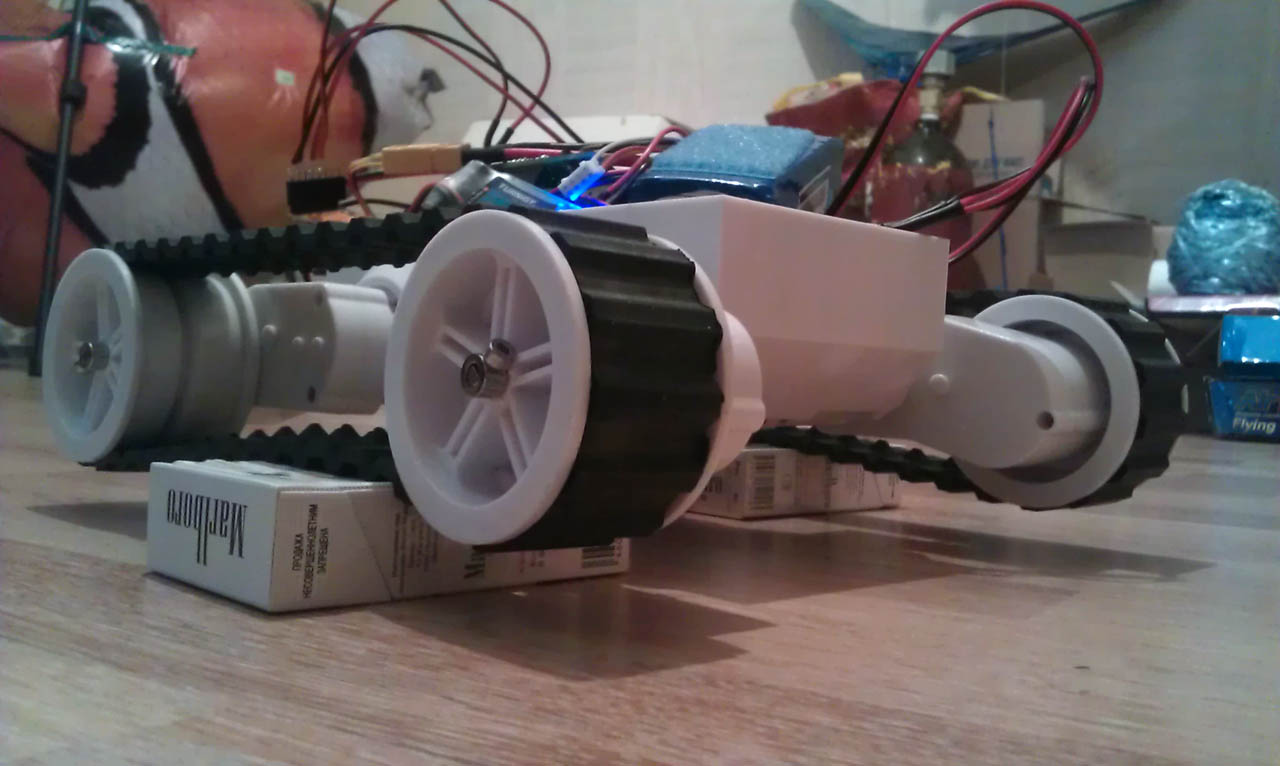
UPD> Колёса приехали. 12см диаметром. Прежний регуль еле тянет :-( Одна надежда на новый, ща буду пробовать.
UPD> Новый регуль вроде ништяг, переделываю под него. Ардуинку заодно меняю на завалявшуюся Mega2560, а то кол-во всякой хрени на борту быстро увеличивается и входов/выходов начинает нехватать, а расширитель входов паять влом (а мегашылда под рукой нету).
UPD> варианты дополнения/модификации: MP3-шылд - мотор-шылды - колёса вместо гусениц -
2 Гость: Ну я не заморачиваюсь свои драйверы движков делаю ибо я не настолько электронщик. Я тока собираю из готового. Хотя, L293D (у меня один шылд как раз на них) .
2 Гость: Ну, шылды хороши именно тем что не надо колхозить, а можно сразу взять готовое и легко подключить к ардуинке. Если, конечно, шылд устраивает по параметрам (ток, напряжение и т.д.). У меня сначала был , но ток 300ma на канал маловат для движков на большой тележке. В итоге на Rover5 поставил , а первый шылд перенёс на мелкую тележку RP5. Вообще, мотор-шылд это устоявшееся название платы с регуляторами коллекторных двигателей для Ардуины. Общее название - регулятор двигателя или просто регуль. Куча всяких разных регулей .
2 Гость: Ну, вам везёт - у вас нет Почты России :-) Так что смело можно заказывать с любого буржуйско-китайского сайта, привезут явно быстрее чем из России :-) Вот, например - .
Не у нас нормально вроде с почтой. С гудлака примерно месяц шел заказ. С европейских и Американских ничего не заказывал, но по прикидкам дороже на много получается. Всякие налоги, они ещё за доставку денег хотят в отличии от китайцев. Наверное придется на гудлаке и заказывать.
Да батарея простая крона, а есть какая-то возможность замерить ток мотора? Потаму что китайцы не потрудились указать, но зато дали коробочку для 6 AA батареек, счас поставил посмотрю сколько они выдержат.
2 Гость: Включи амперметр последовательно с мотором. У Кроны ёмкость вроде как 200-600mAh (в зависимости от производителя). А у АА ёмкость 550-1100 мАч (угольно-цинковая) и 1700—3000 мАч (щелочная). Так что если хорошие АА батарейки - протянуть должно подольше чем Крона.
2 zik: Нет. Язык программирования для ардуины (в обычных случаях) - Processing. На базе С/С++. Но можно и сразу на С писать если желание есть.
А irsend - это готовая библиотека для работы с ИК-сигналами (приём и передача). Точнее, библиотека называется IRRemote (пардон, перепутал), находится , там и примеры использования есть.
2 Гость: Zik, что за националистические вопросы в моём бложике? Я нифига не патриот. Когда такие железки будут производить в России - буду ставить ссылки на российские сайты. Но пока официальные сайты производителей все за бугром, а в Рашке только торгаши. К сожалению.
Привет! Надеюсь, что журнал не заброшен! Недавно пробрел шасси и как всегда недостатки выявляются, когда купил. Гусиницы жестковаты для используемого крепления моторов, разьезжаются, и гусиницы сползают, как боритесь с этим, шестеренки еще целые? Резину если снять с дисков колес, подойдет она на катки гусенец? с уважением Сергей.
2 Гость: Привет! Да ваще совсем заброшен, ни одна зараза не пишеть
Шасси отстой, эт да. У меня тоже гусеницы сваливались, пришлось стяжки ставить. Шестеркнки уже накрылись парочка. Насчет резины не скажу, не пробовал. Я только просто колеса ставил, проблем не было.
Цитата: А какая модель камеры (той, что такая чувствительная) и "подключил моторы по-парно последовательно" - это как ?
Попарно-последовательно - эт я перемудрил, конеш (на один канал регуля два мотора последовательно). Это плохой вариант ибо вращение неравномерное получается.
"У меня тоже гусеницы сваливались" - а разве там нет по середине такого типо зазора, чтоб не сваливались? (я просто только на днях получу, сам ещё не щупал)
:-( ну поздно я этот сайт нашел, платформу рискованно заказывать - там за логичную цену доставка 10-14 дней, а колеса по airmail до 10 дней. С какими по идее на ровере должен дольше проездить (ничего не меняя) - те желтенькие 65 мм или как твои 120 мм? Или вообще от них ничего не зависит и я зря запарился? :)
2 ChrflClf: У жёлтеньких диаметр меньше, так что дольше проездит. Но с жёлтыми не круто смотрится :-D На огромных шипованых колёсах смотрится ништяг, ездит - аж подпрыгивает. Но для резких манёвров сразу надо запасные шестерёнки искать. Я вот уже мечтаю о 3D принтере, чтоб их печатать. Народ вроде пишет что напечатаные норм держатся.
2 Gol Цитата: Я вот уже мечтаю о 3D принтере, чтоб их печатать.
Дороговато будет. Но про шестерёнки учту, надо написать может они могут запасные выслать... Цитата: Gol
Да чтоб я сей час вспомнил :) Вчера искал в гугле про Rover 4WD, точнее подойдёт ли их стандартный шилд для колес или нет (кстати ты так и не ответил - нужны ли более мощные моторчики?) и как этим управлять. По ссылке в ютубе кликнул на твитрер follow, а оказалось я давно тебя уже фоловлю)) ну и потом по конкретному поиску голландца сюда.




Gol Вторник, 13 Марта, 2012 02:48 цитировать ссылка на коммент
Gol Среда, 14 Марта, 2012 06:35 цитировать ссылка на коммент
Гость Воскресенье, 29 Апреля, 2012 01:18 цитировать ссылка на коммент
Gol Воскресенье, 29 Апреля, 2012 13:19 цитировать ссылка на коммент
Rover с четырьмя энкодерами, но я их не подключал ибо пока не за чем.
Гость Четверг, 3 Мая, 2012 10:13 цитировать ссылка на коммент
Gol Четверг, 3 Мая, 2012 16:42 цитировать ссылка на коммент
Дык собссно моторшылд позволяет в оба направления моторы вращать, так что проблемы не вижу
Гость Четверг, 3 Мая, 2012 21:52 цитировать ссылка на коммент
Gol Четверг, 3 Мая, 2012 21:56 цитировать ссылка на коммент
Ну я не заморачиваюсь свои драйверы движков делаю ибо я не настолько электронщик. Я тока собираю из готового. Хотя, L293D (у меня один шылд как раз на них) .
Гость Воскресенье, 6 Мая, 2012 15:51 цитировать ссылка на коммент
Гость Воскресенье, 6 Мая, 2012 15:52 цитировать ссылка на коммент
Gol Воскресенье, 6 Мая, 2012 15:59 цитировать ссылка на коммент
Ну, шылды хороши именно тем что не надо колхозить, а можно сразу взять готовое и легко подключить к ардуинке. Если, конечно, шылд устраивает по параметрам (ток, напряжение и т.д.). У меня сначала был , но ток 300ma на канал маловат для движков на большой тележке. В итоге на Rover5 поставил , а первый шылд перенёс на мелкую тележку RP5. Вообще, мотор-шылд это устоявшееся название платы с регуляторами коллекторных двигателей для Ардуины. Общее название - регулятор двигателя или просто регуль. Куча всяких разных регулей .
Gol Воскресенье, 6 Мая, 2012 16:01 цитировать ссылка на коммент
Вообще, по этой тележке я кучу заметок наваял, можешь посмотреть по тегу
Гость Воскресенье, 6 Мая, 2012 16:04 цитировать ссылка на коммент
Gol Воскресенье, 6 Мая, 2012 16:09 цитировать ссылка на коммент
Ты ж из Риги? Думаю, там у вас и свои интернет-магазины есть с запчастями для Ардуинки :-)
Gol Воскресенье, 6 Мая, 2012 16:18 цитировать ссылка на коммент
Я вот нашёл какой-то , у них вроде для Ардуинки много всего
Гость Воскресенье, 6 Мая, 2012 16:27 цитировать ссылка на коммент
Gol Воскресенье, 6 Мая, 2012 16:32 цитировать ссылка на коммент
Ну, вам везёт - у вас нет Почты России :-) Так что смело можно заказывать с любого буржуйско-китайского сайта, привезут явно быстрее чем из России :-) Вот, например - .
Gol Воскресенье, 6 Мая, 2012 16:33 цитировать ссылка на коммент
Ну и плюс вся Европа под боком :-) Или у вас такой же гемор с почтовыми доставками как и в России?
Гость Воскресенье, 6 Мая, 2012 16:40 цитировать ссылка на коммент
Гость Четверг, 10 Мая, 2012 21:51 цитировать ссылка на коммент
Gol Четверг, 10 Мая, 2012 22:56 цитировать ссылка на коммент
А батареи ёмкость какая? И какой ток у моторов?
Гость Пятница, 11 Мая, 2012 10:10 цитировать ссылка на коммент
Gol Пятница, 11 Мая, 2012 19:40 цитировать ссылка на коммент
Включи амперметр последовательно с мотором. У Кроны ёмкость вроде как 200-600mAh (в зависимости от производителя). А у АА ёмкость 550-1100 мАч (угольно-цинковая) и 1700—3000 мАч (щелочная). Так что если хорошие АА батарейки - протянуть должно подольше чем Крона.
Гость Суббота, 4 Августа, 2012 18:45 цитировать ссылка на коммент
Гость Суббота, 4 Августа, 2012 19:02 цитировать ссылка на коммент
Gol Суббота, 4 Августа, 2012 20:35 цитировать ссылка на коммент
Цитата: Gol падскажи пожалуста как сделать робота с упровлением от пульта для телевизора
С пульта ДУ самое простое - берёшь ардуину, качаешь библиотеку irsend и вперёд.
Гость Суббота, 4 Августа, 2012 22:05 цитировать ссылка на коммент
zik Суббота, 4 Августа, 2012 22:29 цитировать ссылка на коммент
Gol Суббота, 4 Августа, 2012 23:26 цитировать ссылка на коммент
Нет. Язык программирования для ардуины (в обычных случаях) - Processing. На базе С/С++. Но можно и сразу на С писать если желание есть.
А irsend - это готовая библиотека для работы с ИК-сигналами (приём и передача). Точнее, библиотека называется IRRemote (пардон, перепутал), находится , там и примеры использования есть.
zik Воскресенье, 5 Августа, 2012 10:52 цитировать ссылка на коммент
zik Воскресенье, 5 Августа, 2012 13:52 цитировать ссылка на коммент
zik Понедельник, 6 Августа, 2012 18:58 цитировать ссылка на коммент
я почти всё зделал тока стрелять не могу заставить
Gol Понедельник, 6 Августа, 2012 23:19 цитировать ссылка на коммент
Стрелять - эт тебе эйрсофт пушечку надо. Иди на Робофорум, там много такого мастерят. Видеоуроки я не делаю ибо не умею.
zik Вторник, 7 Августа, 2012 07:11 цитировать ссылка на коммент
zik Четверг, 9 Августа, 2012 10:09 цитировать ссылка на коммент
Гость Суббота, 8 Декабря, 2012 15:33 цитировать ссылка на коммент
Gol Суббота, 8 Декабря, 2012 21:55 цитировать ссылка на коммент
Zik, что за националистические вопросы в моём бложике? Я нифига не патриот. Когда такие железки будут производить в России - буду ставить ссылки на российские сайты. Но пока официальные сайты производителей все за бугром, а в Рашке только торгаши. К сожалению.
Гость Суббота, 8 Июня, 2013 20:25 цитировать ссылка на коммент
Gol Суббота, 8 Июня, 2013 23:47 цитировать ссылка на коммент
Привет! Да ваще совсем заброшен, ни одна зараза не пишеть
Шасси отстой, эт да. У меня тоже гусеницы сваливались, пришлось стяжки ставить. Шестеркнки уже накрылись парочка. Насчет резины не скажу, не пробовал. Я только просто колеса ставил, проблем не было.
Гость Воскресенье, 9 Июня, 2013 15:05 цитировать ссылка на коммент
Gol Воскресенье, 9 Июня, 2013 15:47 цитировать ссылка на коммент
А я их и не менял еще. В идеале надо металлические выстрогать но не знаю где станок найти
ChrflClf Четверг, 1 Августа, 2013 09:58 цитировать ссылка на коммент
Gol Четверг, 1 Августа, 2013 09:59 цитировать ссылка на коммент
Уффф, я уж и не помню. Видеоглазок, сенсор Sony. Если найду где он у меня щас валяется - точную модель напишу.
Gol Четверг, 1 Августа, 2013 10:01 цитировать ссылка на коммент
Попарно-последовательно - эт я перемудрил, конеш (на один канал регуля два мотора последовательно). Это плохой вариант ибо вращение неравномерное получается.
ChrflClf Четверг, 1 Августа, 2013 10:02 цитировать ссылка на коммент
(я просто только на днях получу, сам ещё не щупал)
Gol Четверг, 1 Августа, 2013 10:04 цитировать ссылка на коммент
Есть зазор, но не спасает :-( Но хуже всего что шестерёнки в редукторах пластиковые.
ChrflClf Четверг, 1 Августа, 2013 10:25 цитировать ссылка на коммент
Gol Четверг, 1 Августа, 2013 10:25 цитировать ссылка на коммент
Ага
Gol Четверг, 1 Августа, 2013 11:10 цитировать ссылка на коммент
Ну я по-разному пробовал.
По остальным вопросам - "по всему и везде" надо вот таку телегу
ChrflClf Четверг, 1 Августа, 2013 11:31 цитировать ссылка на коммент
Gol Четверг, 1 Августа, 2013 11:38 цитировать ссылка на коммент
С колёсами у меня от активной езды шестерёнка быстро накрылась (они там пластиковые все), так что на этот ровер я забил полностью.
Gol Четверг, 1 Августа, 2013 11:39 цитировать ссылка на коммент
Зато неожиданно понравился RP5, там с гусеницами всё норм.
ChrflClf Четверг, 1 Августа, 2013 12:03 цитировать ссылка на коммент
Gol Четверг, 1 Августа, 2013 12:05 цитировать ссылка на коммент
У жёлтеньких диаметр меньше, так что дольше проездит. Но с жёлтыми не круто смотрится :-D На огромных шипованых колёсах смотрится ништяг, ездит - аж подпрыгивает. Но для резких манёвров сразу надо запасные шестерёнки искать. Я вот уже мечтаю о 3D принтере, чтоб их печатать. Народ вроде пишет что напечатаные норм держатся.
Gol Четверг, 1 Августа, 2013 12:06 цитировать ссылка на коммент
А как ты вообще сюда вышел?
ChrflClf Четверг, 1 Августа, 2013 12:25 цитировать ссылка на коммент
Цитата: Я вот уже мечтаю о 3D принтере, чтоб их печатать.
Дороговато будет. Но про шестерёнки учту, надо написать может они могут запасные выслать...
Цитата: Gol
Да чтоб я сей час вспомнил :) Вчера искал в гугле про Rover 4WD, точнее подойдёт ли их стандартный шилд для колес или нет (кстати ты так и не ответил - нужны ли более мощные моторчики?) и как этим управлять. По ссылке в ютубе кликнул на твитрер follow, а оказалось я давно тебя уже фоловлю)) ну и потом по конкретному поиску голландца сюда.
Gol Четверг, 1 Августа, 2013 12:45 цитировать ссылка на коммент
Ээ, про моторчики я что-то пропустил. Моторы там вроде норм стоят, мне хватило чтоб довольно шустро погонять.
ChrflClf Четверг, 1 Августа, 2013 12:55 цитировать ссылка на коммент
Gol Четверг, 1 Августа, 2013 12:57 цитировать ссылка на коммент
Ага, вроде они. Но у меня они с колёсами в комплекте были.
ChrflClf Четверг, 1 Августа, 2013 14:54 цитировать ссылка на коммент