На D3 как раз в очередной раз выложили ролик с МКС (который я недавно уже размещал). В комментах встретил прекрасное. Но из-за большого размера убрал под кат.
Про МКС я много чего писал уже вот здесь. Там упоминалась ссылочка на прямую транлсяцию с борта МКС, которую NASA ведёт. Одна проблема - там трансляция идёт в MMS, а это не очень гут в плане удобства смотрения. Так что буду ретранслировать (ну нравится мне видео с борта, нравится).
Пока вот тут - , пока работает с перебоями, как время будет - глюки устраню. Ну и мож на другой сервис трансляций перенесу, эт пока хз.
UPD> Отбой - NASA сделало нормальную трансляцию
Трансляция непостоянная. Когда МКС в тень уходит - начинают показывать внутренности МКС. Когда выходит из тени - снова вид на Землю.
Ну а где в данный момент МКС пролетает можно посмотреть вот тут -
А пока - видеоролик с захваченым видео из этой трансляции (грабил не я, а чел из rcdesign). Зато красиво (хоть и качество не ахти)
Спасибо одному челу, который мне сегодня в аськи изложил кучу тонкостей по настройке аппаратуры для коптеров.
Самое первое - регули (ESC). То что существуют альтернативные прошивки для сервомашинок, эт мы уже выяснили. Оказалось, регули тож тюнят. Вот примерно с таким результатом:
Подробная инфа вот тут -
Суть какая - берём регуль (должен быть на базе атмеги), подключаем программатор, заливаем новую прошивку. И всё. Если не лажанулись - регуль станет шибко шустрее.
Пример
А вот тут длиннннющее обсуждение сей модификации .
Следующий момент - рассчёт пропеллеров (и не только) -
Ну и ещё один нюанс - перепрошивка турниги. Прошивка er9x. Обсуждение .
Адаптировал флешку-рулилку под фулскрин для использования на мобильных девайсах. Планшета, к большому сожалению, под рукой нету, так что пришлось тестить на Катюхином телефоне. Это всё та же моя сетевая рулилка, пашет через инет. Сейчас второй провайдер у меня не пашет, так что получается всё локально. Позиционирование пока примитивнейшее, тут ещё подумать надо как удобней управлять, держа телефон в руках. По центру экрана пальцем водить неудобно - не видно происходящее на экране. Короче, есть куда улучшать.
Неожиданный побочный эффект нашёлся - буквально несколькими строками как-то само собой реализовалось управление наклонами телефона. Но я это уже проходил (N900 + Q-steer), ещё тогда выснил что это нифига не удобно на практике. Но сам факт что и так управлять можно - вери гут.
UPD> Неприятный глюк флеша (во всяком случае, под Андроидом) - не умеет толком мультитач. Multitouch.inputMode=MultitouchInputMode.TOUCH_POINT прокатывает нормуль, а вот Multitouch.maxTouchPoints всегда возвращает 1 (хотя Desire S вроде как сразу пять прикосновений умеет обрабатывать). Ну и ID всех касаний равны нулю. Соответственно, мультитачевое управление в флешке сделать, видимо, не удастся. Но вот однотачевое вроде получше стало, чем раньше с мышкой.
UDP> Добавил акселерометр, новый ролик (прежний уехал под кат)
На днях с коллегой спорили о том какой вариант логотипа использовать. Ему нравится один вариант, мне - другой. Пришли к выводу что надо подбросить монетку.
Кидать монетку в реале - влом. Это надо до кухни идти, монетку из копилки доставать. А отрывать жопу от кресла так влом. Что делать? Конечно - кидать на компе, онлайн.
Полез в яндекс, нашёл Всё ништяг, и правда, можно монетку подбросить :-) И сделано довольно симпатишно.
Одна проблема. Вот, допустим, подбросил я монетку. Коллега сидит за компом в семистах километрах от меня. Как он увидит результаты подбрасывания? Он может узнать результат только с моих слов, и наоборот (если он подбрасывает). Какой выход? Сделать мультиплеер. Чтоб можно было зайти на этот сайт с каким-нить айдишником группы. И чтоб все участники группы видели синхронизированный результат.
Собссно, я владельцу того сайта так и написал - хорошо бы мультиюзерский режим. Правда, ответа от него пока нет.
Когда был в Туле в прошлый раз, сразу с двумя человеками (независимо) обсуждали одну и ту же мыслю. Что хорошо бы обзавестить двумерным режущим станком. С лазерной головкой, с фрезой - пофиг. Лучше, конечно, шоп сменная головка была. Отец про такое речь завёл, а потом и Дядя Вася тож самое предложил :-) Купить такой станок дюже дорого, да и нужен он не шибко часто. Но иногда - реально нужен и желательно под рукой чтоб перекроить можно было сразу. Одно дело когда кого-то просить приходится (что не всегда удобно), а другое дело - воткнул расходник, загрузил выкройку и нехай режет.
Короче, дело это шибко геморное (станок замутить), но шибко навороченый и не нужен. Две оси да резалка. Открытые проекты есть вроде как, там самое сложное уже реализовано - преобразование G-кода в перемещения головки.
Но это всё фигня. Надо 3D станок делать. рулит. Хотя думаю что его будет актуальнее купить, продаётся по цене в районе 30 тыр. Зато появляется возможность делать вот такие штуки. Все детали сделаны на 3D принтере, все модели доступны для скачивания.
UPD> Кстати, каждый раз когда слышу про RepRap - вспоминаю роман Лазаревича "". Кто не читал - очень советую. А вдогонку - советую и про червя прочитать оба романа. .
На днях Москва-сити горела. Сегодня соседки рассказывали как клёво это смотрелось. У нас башни Москвы-сити с балкона хорошо видны. Соседки говорят что реально смотрелось как большая горящая спичка. Ветром пламя то в одну, то в другую сторону сдувало. А я, блин, не видел, я сидел работал :-( Такое зрелище пропустил.
Ещё одно зрелище не пропустил, но заснять не успел. Недавно во дворе кто-то фейрверки запускал. Прям посреди двора. А разрываются они как раз напротив наших окон буквально метрах в двадцати по оси Х, в итоге смотрится это всё ну ооочень эффектно. Только вот стрёмно - лишь бы в окно не долбануло.
Здравствуйте. Я - редактор документального кино (канал ТВЦ). Мы делаем документальный фильм о современной роли социальных сетей и хотели бы рассказать зрителям историю Сергей ролтив Загса. В связи с этим я разыскиваю Сергея. Мы хотели бы взять интервью у него и у Вас как организатора сайта. Не согласитесь ли дать нам интервью и помочь связаться с Сергеем? С уважением, %username%
”
Письмо не мне пришло, а админу форума Красногорского где тема Серёги и ЗАГСа широко освещалась :-) Мой же сайтег до сих пор живой, :-) Там комменты закрыты, но вот тут - можно писать (эт они же и есть)
Серёгу найти не получается, все его аськи и номера телефонов не отвечают. Тот самый телефон тож уже в другой квартире (после той истории телефонщики ему номер таки сменили).
Весело тогда было... Я тогда ещё с бородёнкой ходил.
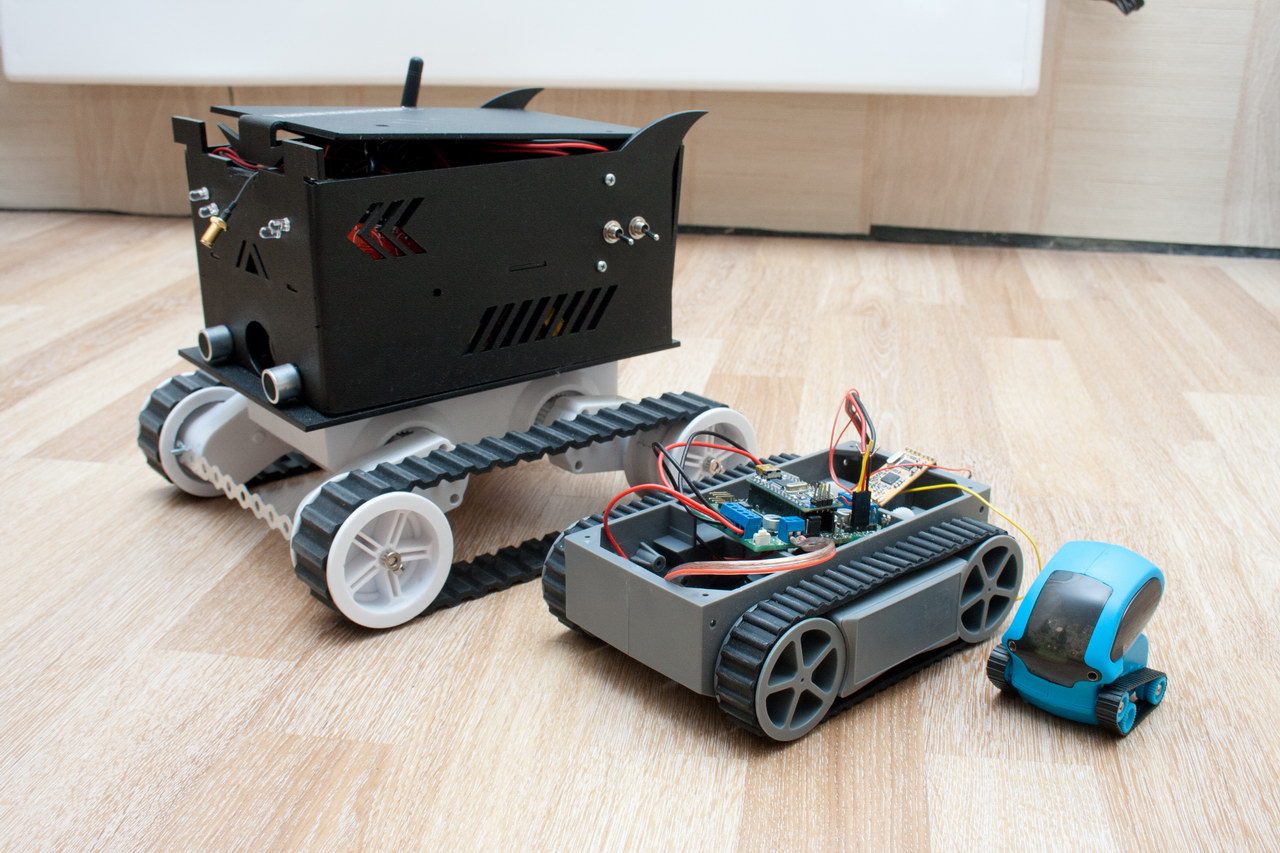
, я нашёл третьего! Будет Алёшей Поповичем :-) Кстати, он тоже поддаётся управлению (по ИК), плюс имеет на борту датчик препятствия (тоже ИК). Можно и его прикрутить к управлялке, но аккум на борту шибко дохлый, тянет очень недолго.
Полный размер Слева направо - Telegue, Мелкий и Здоровяк
Короче, для Мелкого нашлась вся начинка. Наноардуина, моторшылд, APC220 и аккум. Прошивка с небольшим изменением (другая либа для моторшылда) подошла от Телеги. Сейчас пока висят на одном канале, управляются синхронно. Если в прошивке изменить ID (разными сделать у Телеги и у Мелкого) - будут управляться одновременно но независимо друг от друга (на разных каналах). Управление, как обычно, из флеш-ролика на сайте. Второй провайдер у меня ща отрубился за неуплату, так что тестю локально (по домашней сетке).
Датчики решил не ставить, пусть так гоняет. Камеру аналоговую с FPV комплектом приделаю, пофиг на помехи.
Платформочка RP5 клёвая - не такая шумная как Rover5 и более шустрая. Жаль размеры маленькие. А может и не жаль, мож так даже и лучше.
Руку набил уже прилично - подключение новой железки к моей мегасистеме управления уходит час (собрать в кучу комплектуху да настроить нюансы).
Ну и видюшка демонстрационная. Сейчас на Мелком всё свалено в кучу, не пугайтесь. В конце ролика проводок с трансивера отвалился :-) Кстати, на такие случаи предусмотрен специальный таймер на набортной ардуине - вочдог. Если одна и та же команда выполняется дольше определённого таймаута - выполняется команда "обе машины стоп". Щас таймаут равен минуте.
UPD> Назначил разные ID, теперь обе платформы управляются независимо. Из разных браузеров под разными юзерами.
Немножко промахнулся с габаритами. По ТТХ смотрел - вроде чуток меньше чем прошлая тележка. А на деле оказалось что реально меньше. Впопыхах у белой телеги посмотрел размеры самого корпуса, без учёта вынесеных гусениц. А у мелкого размеры были указаны габаритные, с учётом гусениц. Короче, лоханулся я, лоханулся :-)
Шасси вот такое - . Есть ещё RP6, с тахометрами и датчиками препятствий. Но датчики у меня свои, так что заказал простое шасси.
Моторчики тут послабее чем у Rover5, ток кушают небольшой, можно обойтись самым простеньким моторшылдом. Скорость развивают ништяковую. Думаю, воткну туды ардуинку нано плюс оставшийся дальномер, будет тупоботом.
Кстати, надо и большой телеге название придумать, а то "телега" как-то не очень.
UPD> Вспомнил про Лебедевский "Кукусик", название для телеги появилось само собой - "Telegue".
Поставил на тележку дальномеры DYP-ME007, спереди и сзади. Излучатели и приёмники выпаял с плат, удлинил проводками. Платы разместил внутри корпуса, излучатели и приёмники поставил снаружи, смотрится более-менее прилично.
Тележка ездит, дальномер засекает препятствия спереди и сзади. Узкие препятствия засекает, но не всегда, тут ещё доработать надо бы. Задумывалось что при обнаружении припятствия с борта на флешку-рулилку уходит соответствующий сигнал. Если тележкой управляют из флешки, но с помощью джойстика - на джойстик уходит фидбек, джой начинает вибрировать.
Попутно появилась возможность автономного плавания. Тележка сама едет вперёд, если засекает препятствие спереди - выбирает случайным образом следующий маневр. Повернуть налево, направо или двинуть назад. Когда едет назад - то же самое. Теперь главное следить за телегой. Она у меня уже несколько раз удирала в соседнюю комнату, к балкону. Нашёл по звуку.
Выглядит примерно вот так, см. видеоролик. Алгоритм автономки только-только набросал пробный, иногда тупит.
Полез на ютуб заливать свежее видео с тележкой, наткнулся на клёвую штуку. Вообще, молодец чувак из . Клёвое видео снимает. Но вот в хвойном лесу открытый огонь эт они зря, ибо чревато.