UPD> Вовремя смотался, уже дома. До туалета еле добежал (чая было целый термос, а вот горшок не захватил) :-D Ща поем и если не вырублюсь напишу историю сегодняшнего вечера.
Короче, мне нужно мониторить текущую скорость инета, для одного самопального девайса. Инет у меня раздаёт старенький роутер WL-500W, прошивка Олегова. В прошивке уже есть скриптики для базового мониторинга интерфейсов и проца.
Скрипты: http://<логин_админки>:<пароль_админки>@<ip_роутера>/fetchif.cgi?<имя_интерфейса> Т.е., к примеру, для опроса состояния интерфейса WAN будет такая строчка запроса http://admin:password@192.168.1.1/fetchif.cgi?ppp0
Надо обрабатывать одновременно много USB-джойстиков (если точнее - гейпмады с аналоговыми стиками). Вариантов решения задачи явно дохрена. Первым делом пришла идея сделать софтинку для обычного компа (под винду или линух), ею джои и обрабатывать. Но довольно громоздно получается, комп шибко избыточен.
Свежий вариант - ардуина и USB-host шылд. Плюсы - компактность, несложность в программировании, лёгкость добавления/изменения функционала. Но самый, имхо, весомый плюс - приведение зоопарка разных контролеров к единой платформе. Цена решения - 600 руб за ардуину (не за бугром) и 750 руб за USB-шылд (за бугром, на спаркфане) = 1350 руб.
Минусы у такого варианта, наверное, тоже есть. Но пока я их не вижу :-) Быстродействия ардуины может не хватить на слишком уж большое кол-во джоев, но эт очень не факт, тестить надобно.
Короче, ссылки в тему:
Короче, интересно поковырять будет. Тем более что куча применений нарисовалась для этого шылдика.
Какого хрена в мануале по установке DVSDK указано "This release only supports Ubuntu 10.04 LTS 32-bit as your development host". А у меня Ubuntu 11.04 amd64. И все попытки прикинуться 10.04 x86 не прокатили :-( Придётся щас виртуалку разворачивать. Чего там такого критичного в отличиях версий Убунты, что такое жосткое требование? Не "жёсткое", а именно "жосткое"!
UPD> , оказывается, клёвая штука. Я раньше только виртуалками VMWare пользовался, но VirtualBox пошустрее вроде как работает, да и вечной возни с кряками не требует.
UPD> На укоры типа "всё лишь бы в игрушки играться" могу ответить только - работа такая :-)
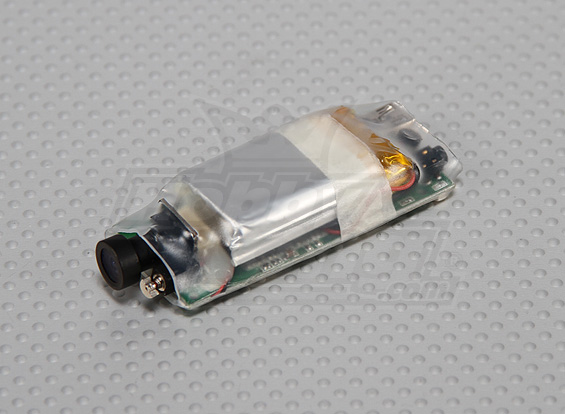
Конечно, пятью мегапикселами там и не пахнет, стопудово обычная матрица 0.3 или 1.3 Mpx, как и на том видеобрелке #11. А до 720p программно интерполируется. Короче, до GoPro, опять же, очень не дотягивает. Но преимущество над видеобрелком всё-таки есть - угол обзора. У брелка примерно 70 градусов, а у этой камеры - 120 (у GoPro - до 170, в зависимости от режима).
Как и в случае с брелком, у этой камеры радует цена - за всё удовольствие - тыща рублей. А, ещё одно преимущество над брелком забыл упомянуть. НЧ-видеовыход, на который подаётся сигнал с текущей картинкой. Т.е. камера одновременно и пишет (в 720p) и подаёт видео на видеовыход. Которое с помощью трансмиттера передавать на землю, там принимать ресивером и показывать на монитор или на видеоочки. Т.е. как раз то что надо для FPV. Долго не врубался как сделать подачу живого видео на выход, прочёл инструкцию - стало всё понятно :-) Видео на выход подаётся только в режиме Motion Detection (MD).
Охххренеть... Падают они смешно :-) Я так понял, роботы не автономные а управляются дистанционно. Вот бы нам парочку таких для футбола-через-интернет заполучить...
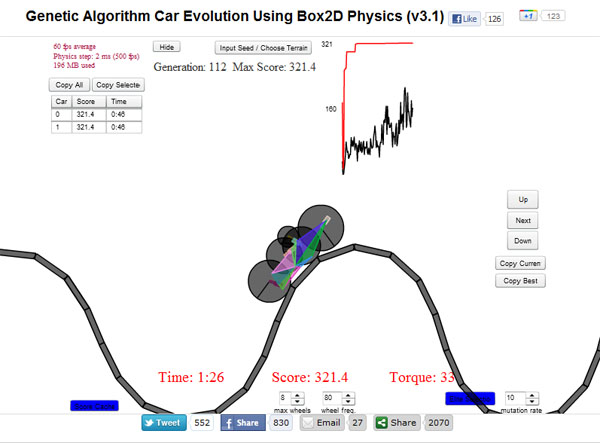
Как горит огонь, как течёт вода, и как эволюционирует по генетическому алгоритму абстрактная "машинка".
Флешка вот тут - Её надо запустить и не трогать долгое время - пусть побольше поколений сменится.
Наткнулся , довольно интересная статья, но многое с порно спорно.
P.S. Кстати, примерно аналогичным способом во второй части дилогии "Червь" - "2019 год: Повелитель Марса" Александра Лазаревича роботы на Марсе эволюционировали.
OSD - это аббревиатура On-Screen Display. Отображение какой-то вспомогательной визуальной информации поверх видео. Кстати, менюшка настроек на экране телевизора, монитора - это всё OSD.
OSD очень удобен для мониторинга параметров полёта радиоуправляемой модели. При наличии на борту достаточного количества датчиков, появляется возможность во время полёта с трансляцией видео с борта на землю прям поверх этого видео наблюдать высоту полёта, направление, крен, координаты, скорость, заряд батареи и т.д. и т.п. Короче, был бы нужный датчик.
Фирменные примочки для OSD стоят довольно приличные деньги (но и функционалом обладают некислым, плюс всё работает сразу из коробки). Но тут на помощь приходит, как обычно, контролер для пилотирующих домохозяек - Arduino.
Кстати, данная фича для ардуины становится доступна при добавлении оригинального шылда - . Возможности интересные открываются для работки видео через композитный вход и выдачи его на такое же выход.
Собссно, я такое ещё не делал, только инфу собирал. Инфа занимает штук двадцать вкладок в Опере, так что, дабы вкладки закрыть можно было, пишу сюда.
Короче, ссылки:
UPD> Кстати, оказывается ещё есть - библиотека для вывода картинки силами самого AVR.
Как-то у меня тут в комментах про самодельную примочку для автоматического фотографирования для последующей склейки в сферическую панораму. Штука клёвая, ибо вручную это делать довольно геморно. У меня вот постоянно недоснятые области оказывались. А так - установил штатив, включил фотик, запустил ардуину и сидишь себе спокойно, ждёшь когда оно само отщёлкает всё что нужно.
Короче, как будет свободное время (надеюсь, когда-нибудь оно таки появится), надо будет сбацать и себе такую же.
Вот сайт того чела - . Там есть и демонстрационное видео, и скетчи для ардуины, и про устройство железки.
Всё базируется на возможности управлять затвором фотоагрегата с ардуины. У чела используется (альтернативная прошивка для фотоаппаратов Canon), которая предоставляет кучу возможностей по управлению процессом фотографирования с любого контролера, к которому фотик подключен через USB. Именно эта прошивка только под Canon подходит, для фотоаппаратов других производителей надо искать аналогичную штуку. На крайний случай можно просто использовать функцию дистанционной съёмки (если фотоаппарат такое поддерживает) - с ардуины в нужный момент выдавать сигнал на ИК-светодиод, а фотик будет её отрабатывать - щёлкать затвором.
Короче, в плане управления, как обычно, проблем особых нет. А вот в плане механики... Полукилограммовую тушку моего 400D просто так не повернёшь, надо серьёзную конструкцию делать.